Xinrui Zu (俎新瑞)
“I align the geometry of how machines perceive — and build the robots that do.”
PhD Student, Vrije Universiteit Amsterdam · Robot Learning · Multimodal Representation · Optimal Transport

Amsterdam, the Netherlands
Computational Intelligence Group
Quantitative Data Analytics Group
Xinrui Zu (祖新瑞) is a PhD student at Vrije Universiteit Amsterdam, jointly in the Computational Intelligence Group and the Quantitative Data Analytics Group, advised by Dr. Kevin Sebastian Luck and Dr. Shujian Yu. He studies the geometry of learned representations — how perception is structured inside neural networks — and uses optimal transport to align that structure across sensory modalities (vision, force, tactile, IMU, proprioception) and across domains (medical imaging and robotics).
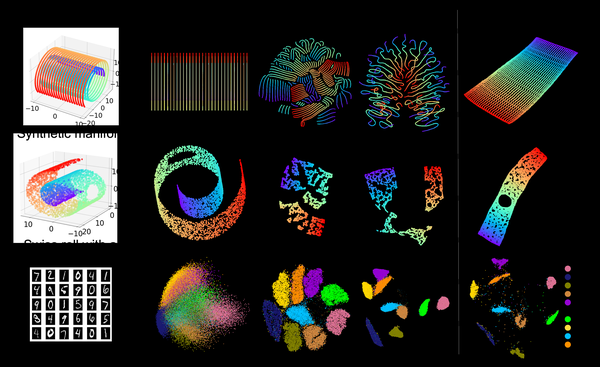
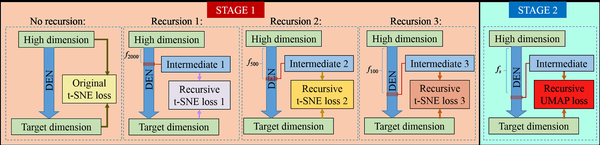
The same idea threads through his work: a Gromov–Wasserstein regularizer for robot perception (UniOMA, ICRA 2026), optimal-transport flows for medical image synthesis, and embedding methods that preserve structure under dimensionality reduction (SpaceMAP, ICML 2022; Deep Recursive Embedding, IEEE TVCG 2022). Before his PhD he was a research assistant at TU Delft, Imaging Physics with Dr. Qian Tao, earned an MSc in Robotics & Mechatronics at the University of Twente, and a BSc in Theoretical & Applied Mechanics at Fudan University. And because alignment shouldn’t stay theoretical, he also builds the robots — modular manipulators, autonomous vehicles, and the sensors they learn from.
Feel free to reach out for collaborations or a chat about optimal transport, multimodal robot learning, or generative models.
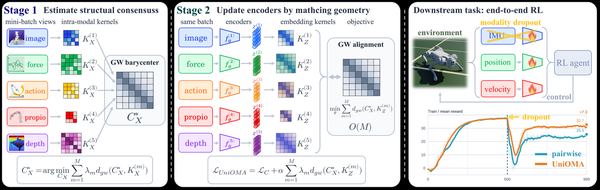
🤖 Featured — UniOMA (ICRA 2026)

What does Xinrui Zu work on?
Xinrui Zu develops optimal-transport methods — primarily Gromov–Wasserstein — that align the structure of different robot sensor modalities rather than matching them point-to-point, improving robustness when sensors fail or drop out. His broader interests span generative models for medical imaging and dimensionality reduction for high-dimensional data visualization.
news
| May 15, 2026 | 🎉 UniOMA was presented at ICRA 2026 Late-Breaking Results and accepted to the ICRA 2026 “From Data to Decisions” workshop (Poster Session 2), Vienna. [Paper] |
|---|---|
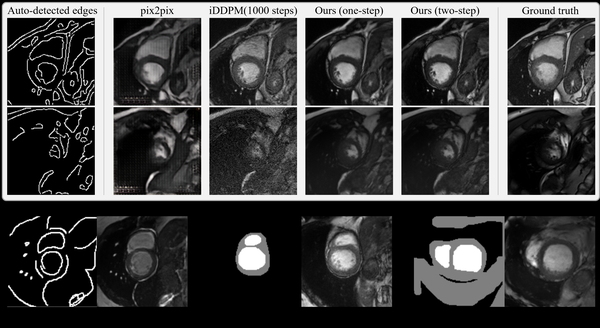
| Apr 10, 2024 | 📄 cHeartFlow — synthesizing cardiac MR images from sketches — was accepted to MIDL 2024. [Paper] |
| May 15, 2022 | 🎉 SpaceMAP was accepted to ICML 2022. [Paper] · [Code] · [Video] |
| Jan 20, 2022 | 📄 Deep Recursive Embedding was published in IEEE TVCG. [Paper] · [Code] |